Creating a simple movement animation
example-1.RmdFirst, load the required packages for this example and the
moveVis example movement data:
move_data is a move2 data frame, containing
three individual tracks. moveVis works with such
move2 class objects. If your movement data are represented
by other classes, e.g. non-spatial data.frames, see
?move2::mt_as_move2 on how to coerce your data into
move2 class objects.
Let’s have a look at both timestamps and sampling rates of
move_data:
unique(mt_time(move_data))
mt_time_lags(move_data, unit = "min")You can see that each track has a sampling rate of roughly 4 minutes.
However, sampling rates differ over time. Due to this, tracks do not
share unique timestamps. For animation, fixed regular frame times are
needed, regardless whether you want to animate a single track or
multiple tracks at once. Thus, we need to align move_data
in order to
- make all tracks share a unique time interval that can be matched by frame times
- make all tracks share a fixed sampling rate without gaps
To achieve the above, we need to apply interpolation. There are many
ways to spatio-temporally interpolate movement tracks. One basic
approach to this is linear referencing, as implemented via
align_move().
You can use align_move to align movement tracks to a fixed
uniform time scale of e.g. 4 minutes:
move_data <- align_move(move_data, res = units::set_units(4, "min"))Instead, you could apply your own functions for aligning your data, e.g. using more advanced interpolation methods.
Now, as movement tracks are aligned, we can pair them with a base map
to create frames that can be turned into an animation later on. You can
use your own base map imagery or choose from default map types provided
by the
basemaps
package. Here is a GIF of some example base maps you can use out of the
box:
You can display a list of all available maps like this:
# get a list of all available map_services and map_types
get_maptypes(as_df = TRUE)
#> map_service map_type
#> 1 osm streets
#> 2 osm streets_de
#> 3 osm topographic
#> 4 osm_stamen toner
#> 5 osm_stamen toner_bg
#> 6 osm_stamen terrain
#> 7 osm_stamen terrain_bg
#> 8 osm_stamen watercolor
#> 9 osm_stadia alidade_smooth
#> 10 osm_stadia alidade_smooth_dark
#> 11 osm_stadia outdoors
#> 12 osm_stadia osm_bright
#> 13 osm_thunderforest cycle
#> 14 osm_thunderforest transport
#> 15 osm_thunderforest landscape
#> 16 osm_thunderforest outdoors
#> 17 osm_thunderforest transport_dark
#> 18 osm_thunderforest spinal
#> 19 osm_thunderforest pioneer
#> 20 osm_thunderforest mobile_atlas
#> 21 osm_thunderforest neighbourhood
#> 22 osm_thunderforest atlas
#> 23 carto light
#> 24 carto light_no_labels
#> 25 carto light_only_labels
#> 26 carto dark
#> 27 carto dark_no_labels
#> 28 carto dark_only_labels
#> 29 carto voyager
#> 30 carto voyager_no_labels
#> 31 carto voyager_only_labels
#> 32 carto voyager_labels_under
#> 33 mapbox streets
#> 34 mapbox outdoors
#> 35 mapbox light
#> 36 mapbox dark
#> 37 mapbox satellite
#> 38 mapbox hybrid
#> 39 mapbox terrain
#> 40 esri natgeo_world_map
#> 41 esri usa_topo_maps
#> 42 esri world_imagery
#> 43 esri world_physical_map
#> 44 esri world_shaded_relief
#> 45 esri world_street_map
#> 46 esri world_terrain_base
#> 47 esri world_topo_map
#> 48 esri world_dark_gray_base
#> 49 esri world_dark_gray_reference
#> 50 esri world_light_gray_base
#> 51 esri world_light_gray_reference
#> 52 esri world_hillshade_dark
#> 53 esri world_hillshade
#> 54 esri world_ocean_base
#> 55 esri world_ocean_reference
#> 56 esri antarctic_imagery
#> 57 esri arctic_imagery
#> 58 esri arctic_ocean_base
#> 59 esri arctic_ocean_reference
#> 60 esri world_boundaries_and_places_alternate
#> 61 esri world_boundaries_and_places
#> 62 esri world_reference_overlay
#> 63 esri world_transportation
#> 64 esri delorme_world_base_map
#> 65 esri world_navigation_charts
#> 66 maptiler aquarelle
#> 67 maptiler aquarelle_dark
#> 68 maptiler aquarelle_vivid
#> 69 maptiler backdrop
#> 70 maptiler basic
#> 71 maptiler bright
#> 72 maptiler dataviz
#> 73 maptiler landscape
#> 74 maptiler ocean
#> 75 maptiler outdoor
#> 76 maptiler satellite
#> 77 maptiler streets
#> 78 maptiler toner
#> 79 maptiler topo
#> 80 maptiler winterCurrently, you can use more than 75 types of maps, e.g. provided by
OpenStreetMap, Carto or Mapbox.
For some map services, you need a (free) map token for which you need an
account at the respective service (see
supported
maps<> for details).
In this example, we want to use the OpenStreetMap ‘topographic’
imagery with a transparency of 50% to standard with a fairly standard
type of map. To create a spatial frames from move_data
using a base map, we can use frames_spatial() like
this:
frames <- frames_spatial(move_data, path_colours = c("red", "green", "blue"),
map_service = "osm", map_type = "topographic", alpha = 0.5)Instead of using path_colours, you can add a
colour column to your move2 object. This
allows you to colour your movement tracks as you want, e.g. not only by
individual track, but by behavioural segment, time, age, speed or
something different (see
?frames_spatial
for details).
Have a look at the newly created frames object. You can retrieve some information about the frames that you have just created and plot individual frames to get first impressions on how your animation will look like:
frames
#> moveVis frames (spatial), ≈ 7.52s at 25 fps using 188 frames
#> Temporal extent: 2018-05-15 07:03:59.636288 to 2018-05-15 19:31:59.636288
#> Spatial extent: xmin: 990463.40648; ymin: 6060710.02464; xmax: 1001881.32133; ymax: 6069317.35905
#> CRS (projected): WGS 84 / Pseudo-Mercator
#> Basemap: 'topographic' from 'osm'
#> Names: 'T932u', 'T342g', 'T246a'
length(frames) # number of frames
#> [1] 188
frames[[100]] # display one of the frames
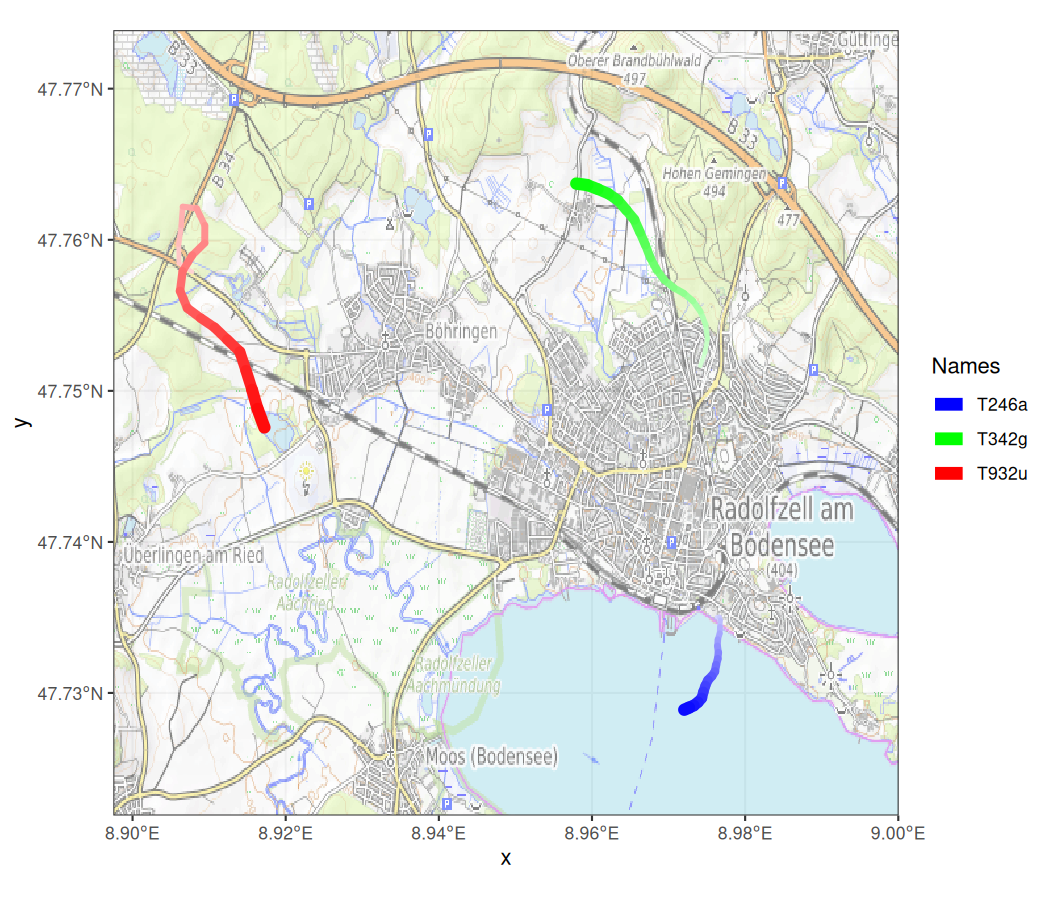
You can pass any moveVis frames object like the one we just created
to animate_frames(). This function will turn your frames
into an animation, written as a GIF image or a video file. For now, we
do not want to add
any customization to frames<> and just create a
GIF from it right away. If you are not sure, which output
formats can be used, run suggest_formats(). This function
returns a vector of file suffixes that can be created on your operating
system. For making a GIF from frames, just
run:
animate_frames(frames, out_file = "example_1.gif")
We have just used a classic OpenStreetMap map as base map. You can
try different map services and types (some of which are showcased as
visual
examples in the basemaps documentation):
frames <- frames_spatial(move_data, path_colours = c("red", "green", "blue"),
map_service = "carto", map_type = "light", map_res = 0.8)
frames[[100]] # display one of the framesLike above, these frames can be put in motion using
animate_frames():
animate_frames(frames, out_file = "example_1b.gif")
That’s the basics of using moveVis! If you want to learn
more, take a look at
how
moveVis frames can be customized – either using the
moveVis add_ functions or by applying
ggplot2 code frame-by-frame.